Exponential Machines¶
Exponential machines (Novikov et al., 2017) are predictors that are able to model all \(2^N\) interactions between \(N\) features. Those interactions are limited to being of degree 1, i.e. the regressor is of the form
and fitting the regressor means finding the best \(w_{\alpha}\) for all \(2^N\) possible \(\alpha\)’s. Besides the \(L^2\) loss on the training data, the original paper also adds an \(L^2\) regularization term (“ridge”) on the set of weights \(w\).
We note that an exponential machine is equivalent to a TT-Tucker model with Tucker rank equal to 2: the first column of the Tucker factors should be a constant (\(1\)), and the second column should be linear (\(x\)). To this end, we can use for example a Legendre expansion of polynomials truncated to 2 basis elements. Note that this can be seen as a particular case of a polynomial chaos expansion.
We will try here a synthetic model with noise: \(f^{\mathrm{true}}(x_1, \dots, x_5) = x_1 x_2 x_3 + x_1 x_2 x_3 x_4 x_5 + \varepsilon\):
[1]:
import torch
import tntorch as tn
P = 100
ntrain = int(P*0.75)
N = 5
ticks = 32 # We will use a 32^5 tensor
X = torch.rand(P, N)*2 - 1 # Features between -1 and 1
y = torch.prod(X, dim=1) + torch.prod(X[:, :3], dim=1)
y += torch.randn(y.shape)*torch.std(y)/10 # Gaussian noise: 1/5th of the clean signal's sigma
X = (X+1)/2*(ticks-1) # Make feature between 0 and ticks-1, i.e. indexable by the tensor
# Split into train/test
X_train = X[:ntrain]
y_train = y[:ntrain]
X_test = X[ntrain:]
y_test = y[ntrain:]
A TT-rank of 2 should be enough to fit this data set, since it arises from the sum of exactly two interactions.
[2]:
t = tn.rand(shape=[ticks]*N, ranks_tt=2, ranks_tucker=2, requires_grad=True)
t.set_factors('legendre', requires_grad=False) # We set the factors to Legendre polynomials, and fix them (won't be changed during optimization)
[3]:
def loss(t):
return tn.relative_error(y_train, t[X_train])**2
tn.optimize(t, loss)
iter: 0 | loss: 7.956270 | total time: 0.0022
iter: 500 | loss: 0.475733 | total time: 0.9688
iter: 1000 | loss: 0.071103 | total time: 1.8799
iter: 1500 | loss: 0.024970 | total time: 2.8605
iter: 2000 | loss: 0.013503 | total time: 3.9351
iter: 2500 | loss: 0.009449 | total time: 5.0269
iter: 3000 | loss: 0.007776 | total time: 6.1072
iter: 3500 | loss: 0.007118 | total time: 7.1863
iter: 3532 | loss: 0.007094 | total time: 7.2544 <- converged (tol=0.0001)
[4]:
print('Test relative error:', tn.relative_error(y_test, t[X_test]))
Test relative error: tensor(0.1051, grad_fn=<DivBackward1>)
The tensor of weights (\(\mathcal{W}\) in the original paper) can be retrieved as the TT part of our TT-Tucker tensor:
[5]:
core = tn.Tensor(t.cores)
core
[5]:
5D TT tensor:
2 2 2 2 2
| | | | |
(0) (1) (2) (3) (4)
/ \ / \ / \ / \ / \
1 2 2 2 2 1
[6]:
import matplotlib.pyplot as plt
%matplotlib inline
import numpy as np
plt.figure()
plt.bar(np.arange(core.size), np.sort(core.numpy().flatten()))
plt.show()
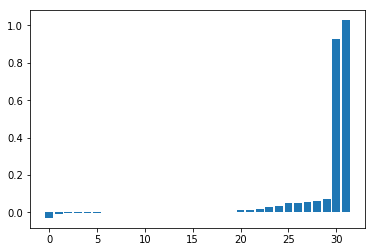
Despite the noise, the model correctly retrieved the two interacting components. Those indeed correspond to \(x_1 x_2 x_3\) and \(x_1 x_2 x_3 x_4 x_5\):
[7]:
print(core[1, 1, 1, 0, 0])
print(core[1, 1, 1, 1, 1])
tensor(1.0280, grad_fn=<SqueezeBackward0>)
tensor(0.9253, grad_fn=<SqueezeBackward0>)
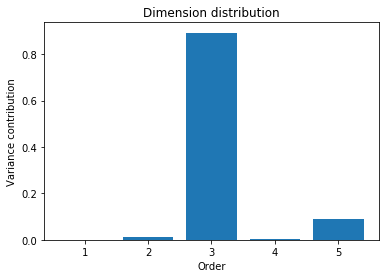
The orders of participating interactions (namely, 3 and 5) can be revealed as well by the dimension distribution:
[8]:
plt.figure()
plt.bar(np.arange(1, N+1), tn.dimension_distribution(t).numpy())
plt.xlabel('Order')
plt.ylabel('Variance contribution')
plt.title('Dimension distribution')
plt.show()